
Универсальный робо-захват на основе сыпучих материалов
Исследователи из Америки создали универсальный и простой в использовании манипулятор, который способен захватывать и поднимать предметы абсолютно любых форм. Рабочий элемент данного манипулятора — сыпучие материалы, которые обладают уникальной способностью: при изменении давления они «переключаться» между жестким и текучим состояниями.
Одна из основных задач роботехники — это создание роботизированных высокоэффективных «рук», которые были бы способны как захватывать различные предметы, так и проводить с ними какие-либо манипуляции. Перед создателями ставятся следующие задачи:
- Универсальность — крепкий захват и перемещение на определенное расстояние предметов различных форм;
- Интеллектуальность — минимальное количество времени на распознание формы предметов;
- Безопасность для хрупких и легко деформируемых предметов
- Надежность
Современные разработки
Роботизированные манипуляторы современности решают такого рода задачи совсем не полностью. Так, большинство робо-рук на сегодняшний день состоят из 2-х или больше пальцев, которые способны поднять предмет, сдавив его, либо ухватив за выступы.

Чтобы такой принцип работы был эффективным, необходимо:
- Делать такие «руки», пальцы у которых будут иметь несколько независимых суставов, что подразумевает использование сверх точной электромеханики;
- Устроить обратную связь как при помощи сенсоров давления, расположенных на концах «пальцев», так и визуальную связь;
- Обладать мощными вычислительными ресурсами для того, чтобы иметь возможность проводить обработку в реальном времени всей информации, которая поступает от сенсоров и визуально, рассчитывать механику самого процесса, формировать отдельные команды для каждого сустава на каждом из пальцев.
Как правило, всё это уже сегодня осуществимо, но невероятная сложность такой реализации просто несоразмерна начальной задаче — всего лишь взять предмет. Также, данная схема не снимает второго пункта списка, поскольку прежде чем «взять» любой предмет, обладающий неизвестными «руке» механическими свойствами, роботу необходимо сначала его изучить. Это можно сделать только при помощи ощупывания, ведь нужно знать, какую необходимо приложить силу к определенным точкам на поверхности предмета.
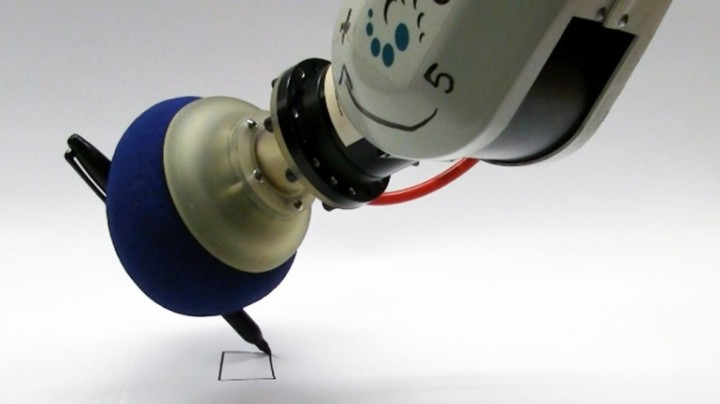
Американские исследователи реализовали новую и достаточно простую схему такой универсальной робо-руки. Принцип ее действия основан на поистине уникальных особенностях сыпучих веществ. В зависимости от определенных условий, они могут держать большое давление, словно твердые тела, а могут течь, как жидкости.

Конструкция и принцип работы
Роба-рука имеет очень простую конструкцию. Она состоит из латексного мешочка, который имеет размер в несколько сантиметров. Мешочек полностью заполнен сыпучим материалом (ученые использовали даже молотый кофе!) и герметично закрыт. Также к этому мешочку подведена трубка, другой конец которой прикреплен к насосу, который способен полностью откачать воздух, находящийся в свободном между частичками сыпучего материала пространстве.
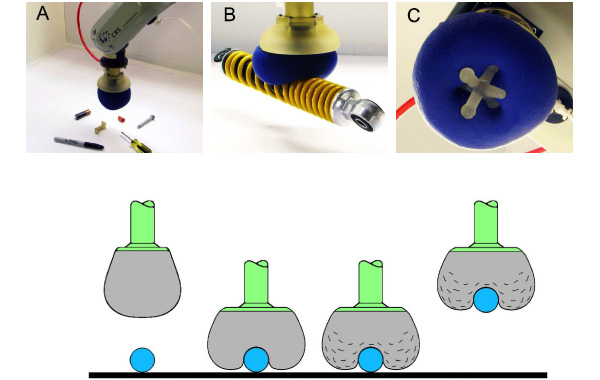
В нормальном состоянии сыпучий материал достаточно податлив, вот почему мешочек очень легко начинает деформироваться при любом воздействии. Когда манипулятор опускает мешочек на находящийся на столе предмет, то сыпучий материал просто обволакивает абсолютно все выступы данного предмета, тем самым приняв его форму. Теперь насос откачивает воздух из мешочка, при этом сыпучий материал в нем резко «твердеет», поскольку атмосферное давление сдавливает его, и возникшее трения частичек друг о друга не позволяет им так легко смещаться во все стороны. В физике подобное явление в сыпучих веществах при увеличении давления называют «фазовым переходом» — резкий переход из состояния податливости в состояние упругости. Обратный процесс вы можете легко наблюдать дома, ведь достаточно просто проткнуть новую пачку молотого кофе и вы сразу ощутите, как брикет мгновенно потеряет твердость.
Главное в процессе выкачивания воздуха то, что происходящее мгновенное затвердение состоится фактически без смены формы мешочка, что и помогает предмету оказаться внутри своеобразных «тисков» идеальной для него формы. Такие «тески» прочно держат предмет, при этом практически не оказывая на него давления. Далее манипулятор с легкостью поднимает предмет. В списке уже успешно поднятых объектов есть такие предметы и небольшие устройства, как лампочки накаливания, крышки от бутылок, конфеты, светодиоды, разного рода канцелярские принадлежности, батарейки и многие другие. Авторы признают, что мягкие шарики из ваты и компакт диски данное устройство захватить никак не смогло.
Сильные стороны и дальнейшее развитие
Сильные стороны данного манипулятора видны сразу:
- Данное устройство является практически универсальным и способно поднимать предметы практически всех форм;
- Такой манипулятор предварительно не ощупывает предмет, ведь сыпучий наполнитель в изначальном состоянии способен автоматически принимать необходимую форму;
- Устройство безопасно даже для самих хрупких предметов. Кроме того, такое устройство способно поднимать даже такие предметы, которые уже развалились на части, и переносить их, при этом не меняя положения частей относительно друг друга;
- Он исключительно прост как в работе, так и в строении. Ему не нужно точной и сложной электрической и механической «начинки» (можно обойтись даже без электричества!), ни множества различных сенсоров, ни уникальных материалов для изготовления, ни мощных компьютеров для расчетов всех его действий в реальном времени;
- Манипулятор обладает простотой в обращении; если же он сломается, то его точно можно починить даже в полевых условиях.
Все эти свойства манипулятор получил благодаря тому, что он представляет из себя не активное устройство, как привычная робо-рука, а пассивное — благодаря ему не происходит приложение активных действий для того, чтобы поддерживать предмет, ведь сама природа уже всё сделала сама.
Удерживание предметов происходит благодаря сразу 3-м разным силам:
- простая механическая поддержка, ведь сыпучий материал в мешочке приобрел необходимую жесткость;
- сила трения поверхности предмета об латексную поверхность мешочка;
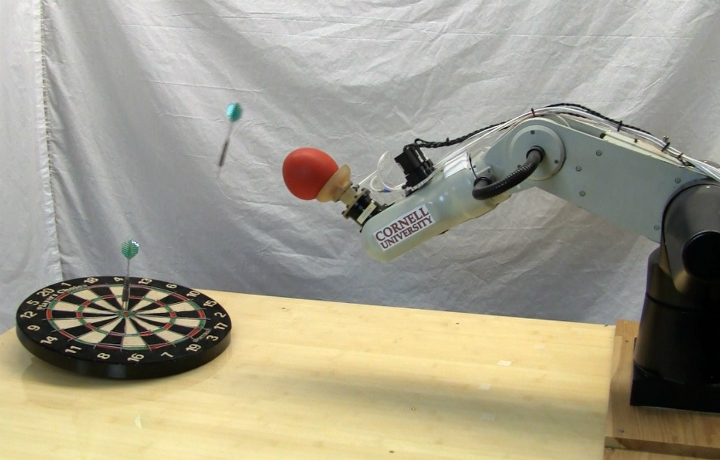
- так называемый «эффект присоски», который срабатывает на гладкой поверхности. Небольшой участок мембраны между частичками вещества просто втягивается, при этом «засасывая» сам предмет. Благодаря данному механизму действия нет нужды обхватывать необходимый предмет с разных сторон. Его достаточно просто подхватить с одной стороны, при этом сила такого удержания вырастает в несколько раз. С помощью опытов ученые выяснили, что мешочек, имеющий радиус всего 4 см, может легко удерживать на весу предметы весом по несколько килограмм!
Следующий шаг — изучение механики устройства в процессе сложного манипулирования предметами разных форм, массы и размеров.








